
Xiao Ling
Posted on September 7, 2022

Dynamsoft Document Normalizer is a document scanning SDK that can be used to do edge detection, perspective correction, and contrast enhancement. Its C/C++ API is available on Windows and Linux. In this article, we will show you how to build a Python wrapper for Dynamsoft C/C++ Document Normalizer SDK, as well as how to quickly implement a document scanner with Python on Windows and Linux.
Python Wrapper for Dynamsoft C/C++ Document Normalizer SDK
Here we are not going to talk about how to build a Python C/C++ extension from scratch. If you are interested in this topic, you can refer to this article. Instead, we will focus on the C/C++ implementation of the Python wrapper for Dynamsoft C/C++ Document Normalizer SDK.
Customized PyObjects in C/C++
We define three native PyObjects, which will be interacted with Python code:
-
DynamsoftDocumentScanner: the native object that holds the pointer to the C/C++ Document Normalizer instance
typedef struct { PyObject_HEAD void *handler; PyObject *callback; WorkerThread *worker; } DynamsoftDocumentScanner; -
DocumentResult: the native object that holds the contour points of the detected document
typedef struct { PyObject_HEAD PyObject *confidence; PyObject *x1; PyObject *y1; PyObject *x2; PyObject *y2; PyObject *x3; PyObject *y3; PyObject *x4; PyObject *y4; } DocumentResult; -
NormalizedImage: the native object that holds the normalized image buffer
typedef struct { PyObject_HEAD PyObject *bytearray; PyObject *length; PyObject *width; PyObject *height; PyObject *stride; PyObject *format; NormalizedImageResult* normalizedResult; } NormalizedImage;
Methods Implementation
The DynamsoftDocumentScanner module contains following methods:
static PyMethodDef instance_methods[] = {
{"detectFile", detectFile, METH_VARARGS, NULL},
{"detectMat", detectMat, METH_VARARGS, NULL},
{"addAsyncListener", addAsyncListener, METH_VARARGS, NULL},
{"detectMatAsync", detectMatAsync, METH_VARARGS, NULL},
{"setParameters", setParameters, METH_VARARGS, NULL},
{"normalizeFile", normalizeFile, METH_VARARGS, NULL},
{"normalizeBuffer", normalizeBuffer, METH_VARARGS, NULL},
{NULL, NULL, 0, NULL}
};
-
detectFile: Detects the document in the image file and returns the contour points.
static PyObject *detectFile(PyObject *obj, PyObject *args) { DynamsoftDocumentScanner *self = (DynamsoftDocumentScanner *)obj; char *pFileName; // File name if (!PyArg_ParseTuple(args, "s", &pFileName)) { return NULL; } DetectedQuadResultArray *pResults = NULL; int ret = DDN_DetectQuadFromFile(self->handler, pFileName, "", &pResults); if (ret) { printf("Detection error: %s\n", DC_GetErrorString(ret)); } PyObject *list = createPyList(pResults); // Release memory if (pResults != NULL) DDN_FreeDetectedQuadResultArray(&pResults); return list; } -
detectMat: Detects the document in the image buffer and returns the contour points.
static PyObject *detectMat(PyObject *obj, PyObject *args) { DynamsoftDocumentScanner *self = (DynamsoftDocumentScanner *)obj; PyObject *o; if (!PyArg_ParseTuple(args, "O", &o)) return NULL; Py_buffer *view; int nd; PyObject *memoryview = PyMemoryView_FromObject(o); if (memoryview == NULL) { PyErr_Clear(); return NULL; } view = PyMemoryView_GET_BUFFER(memoryview); char *buffer = (char *)view->buf; nd = view->ndim; int len = view->len; int stride = view->strides[0]; int width = view->strides[0] / view->strides[1]; int height = len / stride; ImagePixelFormat format = IPF_RGB_888; if (width == stride) { format = IPF_GRAYSCALED; } else if (width * 3 == stride) { format = IPF_RGB_888; } else if (width * 4 == stride) { format = IPF_ARGB_8888; } ImageData data; data.bytes = (unsigned char *)buffer; data.width = width; data.height = height; data.stride = stride; data.format = format; data.bytesLength = len; DetectedQuadResultArray *pResults = NULL; int ret = DDN_DetectQuadFromBuffer(self->handler, &data, "", &pResults); if (ret) { printf("Detection error: %s\n", DC_GetErrorString(ret)); } PyObject *list = createPyList(pResults); // Release memory if (pResults != NULL) DDN_FreeDetectedQuadResultArray(&pResults); Py_DECREF(memoryview); return list; } -
addAsyncListeneranddetectMatAsync: Uses a native thread to run edge detection task asynchronously and returns the contour points.
static PyObject *addAsyncListener(PyObject *obj, PyObject *args) { DynamsoftDocumentScanner *self = (DynamsoftDocumentScanner *)obj; PyObject *callback = NULL; if (!PyArg_ParseTuple(args, "O", &callback)) { return NULL; } if (!PyCallable_Check(callback)) { PyErr_SetString(PyExc_TypeError, "parameter must be callable"); return NULL; } else { Py_XINCREF(callback); /* Add a reference to new callback */ Py_XDECREF(self->callback); /* Dispose of previous callback */ self->callback = callback; } if (self->worker == NULL) { self->worker = new WorkerThread(); self->worker->running = true; self->worker->t = std::thread(&run, self); } return Py_BuildValue("i", 0); } static PyObject *detectMatAsync(PyObject *obj, PyObject *args) { DynamsoftDocumentScanner *self = (DynamsoftDocumentScanner *)obj; PyObject *o; if (!PyArg_ParseTuple(args, "O", &o)) return NULL; Py_buffer *view; int nd; PyObject *memoryview = PyMemoryView_FromObject(o); if (memoryview == NULL) { PyErr_Clear(); return NULL; } view = PyMemoryView_GET_BUFFER(memoryview); char *buffer = (char *)view->buf; nd = view->ndim; int len = view->len; int stride = view->strides[0]; int width = view->strides[0] / view->strides[1]; int height = len / stride; ImagePixelFormat format = IPF_RGB_888; if (width == stride) { format = IPF_GRAYSCALED; } else if (width * 3 == stride) { format = IPF_RGB_888; } else if (width * 4 == stride) { format = IPF_ARGB_8888; } unsigned char *data = (unsigned char *)malloc(len); memcpy(data, buffer, len); std::unique_lock<std::mutex> lk(self->worker->m); if (self->worker->tasks.size() > 1) { std::queue<std::function<void()>> empty = {}; std::swap(self->worker->tasks, empty); } std::function<void()> task_function = std::bind(scan, self, data, width, height, stride, format, len); self->worker->tasks.push(task_function); self->worker->cv.notify_one(); lk.unlock(); Py_DECREF(memoryview); return Py_BuildValue("i", 0); } -
setParameters: Sets the parameters for the document scanner SDK.
static PyObject *setParameters(PyObject *obj, PyObject *args) { DynamsoftDocumentScanner *self = (DynamsoftDocumentScanner *)obj; const char*params; if (!PyArg_ParseTuple(args, "s", ¶ms)) { return NULL; } char errorMsgBuffer[512]; int ret = DDN_InitRuntimeSettingsFromString(self->handler, params, errorMsgBuffer, 512); printf("Init runtime settings: %s\n", errorMsgBuffer); return Py_BuildValue("i", ret); } -
normalizeFile: Normalizes the document based on the contour points.
static PyObject *normalizeFile(PyObject *obj, PyObject *args) { DynamsoftDocumentScanner *self = (DynamsoftDocumentScanner *)obj; char *pFileName; int x1, y1, x2, y2, x3, y3, x4, y4; if (!PyArg_ParseTuple(args, "siiiiiiii", &pFileName, &x1, &y1, &x2, &y2, &x3, &y3, &x4, &y4)) return NULL; Quadrilateral quad; quad.points[0].coordinate[0] = x1; quad.points[0].coordinate[1] = y1; quad.points[1].coordinate[0] = x2; quad.points[1].coordinate[1] = y2; quad.points[2].coordinate[0] = x3; quad.points[2].coordinate[1] = y3; quad.points[3].coordinate[0] = x4; quad.points[3].coordinate[1] = y4; NormalizedImageResult* normalizedResult = NULL; int errorCode = DDN_NormalizeFile(self->handler, pFileName, "", &quad, &normalizedResult); if (errorCode != DM_OK) printf("%s\r\n", DC_GetErrorString(errorCode)); PyObject *normalizedImage = createNormalizedImage(normalizedResult); return normalizedImage; } -
normalizeBuffer: Normalizes the document based on the contour points.
static PyObject *normalizeBuffer(PyObject *obj, PyObject *args) { DynamsoftDocumentScanner *self = (DynamsoftDocumentScanner *)obj; PyObject *o; int x1, y1, x2, y2, x3, y3, x4, y4; if (!PyArg_ParseTuple(args, "Oiiiiiiii", &o, &x1, &y1, &x2, &y2, &x3, &y3, &x4, &y4)) return NULL; Py_buffer *view; int nd; PyObject *memoryview = PyMemoryView_FromObject(o); if (memoryview == NULL) { PyErr_Clear(); return NULL; } view = PyMemoryView_GET_BUFFER(memoryview); char *buffer = (char *)view->buf; nd = view->ndim; int len = view->len; int stride = view->strides[0]; int width = view->strides[0] / view->strides[1]; int height = len / stride; ImagePixelFormat format = IPF_RGB_888; if (width == stride) { format = IPF_GRAYSCALED; } else if (width * 3 == stride) { format = IPF_RGB_888; } else if (width * 4 == stride) { format = IPF_ARGB_8888; } ImageData data; data.bytes = (unsigned char *)buffer; data.width = width; data.height = height; data.stride = stride; data.format = format; data.bytesLength = len; Quadrilateral quad; quad.points[0].coordinate[0] = x1; quad.points[0].coordinate[1] = y1; quad.points[1].coordinate[0] = x2; quad.points[1].coordinate[1] = y2; quad.points[2].coordinate[0] = x3; quad.points[2].coordinate[1] = y3; quad.points[3].coordinate[0] = x4; quad.points[3].coordinate[1] = y4; NormalizedImageResult* normalizedResult = NULL; int errorCode = DDN_NormalizeBuffer(self->handler, &data, "", &quad, &normalizedResult); if (errorCode != DM_OK) printf("%s\r\n", DC_GetErrorString(errorCode)); PyObject *normalizedImage = createNormalizedImage(normalizedResult); Py_DECREF(memoryview); return normalizedImage; }
The NormalizedImage module contains two methods: save() and recycle(). Since the object holds the pointer of the native image data, the recycle() method must be called when the NormalizedImage object is no more used.
static PyMethodDef ni_instance_methods[] = {
{"save", save, METH_VARARGS, NULL},
{"recycle", recycle, METH_VARARGS, NULL},
{NULL, NULL, 0, NULL}
};
static PyObject *save(PyObject *obj, PyObject *args)
{
NormalizedImage *self = (NormalizedImage *)obj;
char *pFileName; // File name
if (!PyArg_ParseTuple(args, "s", &pFileName))
{
return NULL;
}
if (self->normalizedResult)
{
DDN_SaveImageDataToFile(self->normalizedResult->image, pFileName);
printf("Save image to file: %s\n", pFileName);
return Py_BuildValue("i", 0);
}
return Py_BuildValue("i", -1);
}
static PyObject *recycle(PyObject *obj, PyObject *args)
{
NormalizedImage *self = (NormalizedImage *)obj;
if (self->normalizedResult)
{
DDN_FreeNormalizedImageResult(&self->normalizedResult);
self->normalizedResult = NULL;
}
return Py_BuildValue("i", 0);
}
Download the Package from PyPI
The document-scanner-sdk package is available on https://pypi.org/project/document-scanner-sdk/.
Get a 30-Day Free Trial License
To activate the SDK, you need to get a 30-day free trial license from the online portal.

Python Document Scanner
Install OpenCV and Document Scanner SDK:
pip install opencv-python document-scanner-sdk
The OpenCV package depends on NumPy, which will be installed along with it.
Scan Documents from Image Files
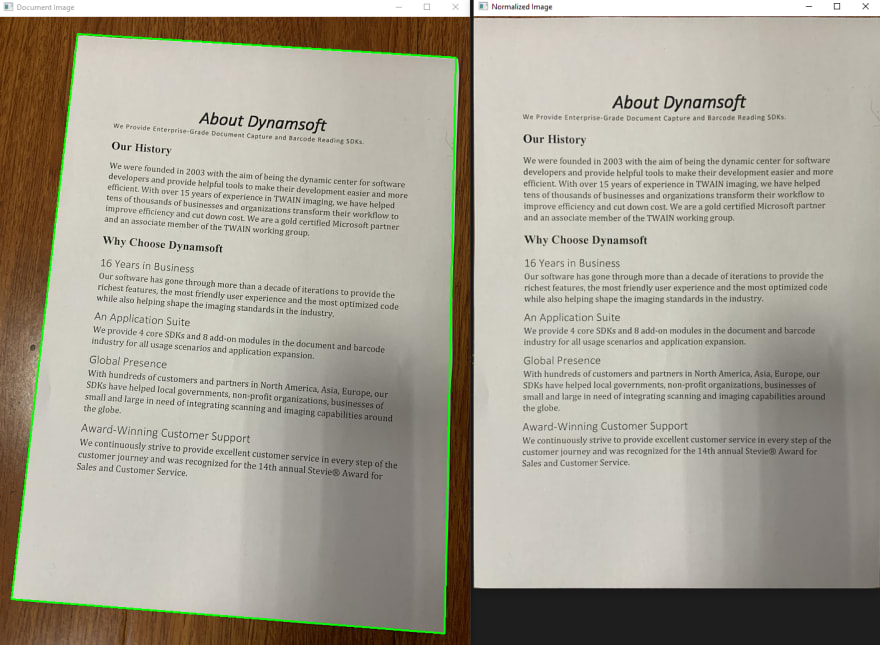
Let's get started with a simple example. The following code snippet shows how to use the SDK to scan a document from an image file.
from time import sleep
import docscanner
import numpy as np
import cv2
import time
def showNormalizedImage(name, normalized_image):
mat = docscanner.convertNormalizedImage2Mat(normalized_image)
cv2.imshow(name, mat)
return mat
docscanner.initLicense("DLS2eyJoYW5kc2hha2VDb2RlIjoiMjAwMDAxLTE2NDk4Mjk3OTI2MzUiLCJvcmdhbml6YXRpb25JRCI6IjIwMDAwMSIsInNlc3Npb25QYXNzd29yZCI6IndTcGR6Vm05WDJrcEQ5YUoifQ==")
scanner = docscanner.createInstance()
ret = scanner.setParameters(docscanner.Templates.color)
image = cv2.imread("images/1.png")
results = scanner.detectMat(image)
for result in results:
x1 = result.x1
y1 = result.y1
x2 = result.x2
y2 = result.y2
x3 = result.x3
y3 = result.y3
x4 = result.x4
y4 = result.y4
normalized_image = scanner.normalizeBuffer(image, x1, y1, x2, y2, x3, y3, x4, y4)
normalized_image.recycle()
showNormalizedImage("Normalized Image", normalized_image)
cv2.drawContours(image, [np.int0([(x1, y1), (x2, y2), (x3, y3), (x4, y4)])], 0, (0, 255, 0), 2)
cv2.imshow('Document Image', image)
cv2.waitKey(0)
Scan Documents from Camera
Now, we move to the camera example with detailed steps.
We utilize OpenCV's video I/O API to capture and show camera video stream:
import cv2
cap = cv2.VideoCapture(0)
while True:
ret, image = cap.read()
ch = cv2.waitKey(1)
if ch == 27:
break
cv2.imshow('Document Scanner', image)
Initialize the document scanner with a valid license key:
import docscanner
docscanner.initLicense("DLS2eyJoYW5kc2hha2VDb2RlIjoiMjAwMDAxLTE2NDk4Mjk3OTI2MzUiLCJvcmdhbml6YXRpb25JRCI6IjIwMDAwMSIsInNlc3Npb25QYXNzd29yZCI6IndTcGR6Vm05WDJrcEQ5YUoifQ==")
scanner = docscanner.createInstance()
You can select a built-in template to set the output type of a normalized document: binary, grayscale, or color.
scanner.setParameters(docscanner.Templates.color)
The template can be customized by referring to the template documentation. A more complicated parameter template looks like this:
{
"GlobalParameter":{
"Name":"GP",
"MaxTotalImageDimension":0
},
"ImageParameterArray":[
{
"Name":"IP-1",
"RegionPredetectionModes":[
{
"Mode": "RPM_GENERAL"
}
],
"Timeout": 10000,
"ColourChannelUsageType": "CCUT_AUTO",
"MaxThreadCount": 4,
"ScaleDownThreshold": 2300,
"ColourConversionModes":[
{
"Mode": "CICM_GENERAL",
"BlueChannelWeight": -1,
"GreenChannelWeight": -1,
"RedChannelWeight": -1
}
],
"GrayscaleTransformationModes":[
{
"Mode": "GTM_ORIGINAL"
}
],
"GrayscaleEnhancementModes": [
{
"Mode": "GEM_GENERAL"
}
],
"BinarizationModes":[
{
"Mode": "BM_LOCAL_BLOCK",
"BlockSizeX": 0,
"BlockSizeY": 0,
"EnableFillBinaryVacancy": 0,
"MorphOperation": "Close",
"MorphShape": "Rectangle",
"MorphOperationKernelSizeX": -1,
"MorphOperationKernelSizeY": -1,
"ThresholdCompensation": 10
}
],
"TextureDetectionModes":[
{
"Mode": "TDM_GENERAL_WIDTH_CONCENTRATION",
"Sensitivity": 5
}
],
"TextFilterModes": [
{
"Mode": "TFM_GENERAL_CONTOUR",
"IfEraseTextZone": 0,
"MinImageDimension": 65536,
"Sensitivity": 0
}
],
"LineExtractionModes": [
{
"Mode": "LEM_GENERAL"
}
],
"NormalizerParameterName":"NP-1",
"BaseImageParameterName":""
}
],
"NormalizerParameterArray":[
{
"Name":"NP-1",
"ContentType": "CT_DOCUMENT",
"InteriorAngleRangeArray": [
{
"MinValue": 70,
"MaxValue": 110
}
],
"QuadrilateralDetectionModes": [
{
"Mode": "QDM_GENERAL"
}
],
"DeskewMode": {
"Mode": "DM_PERSPECTIVE_CORRECTION",
"ContentDirection": 0
},
"PageSize": [-1, -1],
"ColourMode": "ICM_BINARY",
"Brightness": 0,
"Contrast": 0
}
]
}
In live camera scenarios, all CPU-intensive tasks, such as document edge detection, should be executed in a separate thread to avoid blocking the main thread. Therefore, we register a callback function to a native thread and call the asynchronous detection method to queue the detection tasks that will be consumed by the native thread:
g_results = None
g_normalized_images = []
index = 0
def callback(results):
global g_results
g_results = results
def process_video(scanner):
global g_normalized_images, index
scanner.addAsyncListener(callback)
cap = cv2.VideoCapture(0)
while True:
ret, image = cap.read()
ch = cv2.waitKey(1)
if ch == 27:
break
if image is not None:
scanner.detectMatAsync(image)
if g_results != None:
for result in g_results:
x1 = result.x1
y1 = result.y1
x2 = result.x2
y2 = result.y2
x3 = result.x3
y3 = result.y3
x4 = result.x4
y4 = result.y4
cv2.drawContours(image, [np.int0([(x1, y1), (x2, y2), (x3, y3), (x4, y4)])], 0, (0, 255, 0), 2)
cv2.imshow('Document Scanner', image)
So far, the real-time document edge detection function has been implemented. To crop the document based on the contour points and take a further step to normalize the document, we need to call the normalizeBuffer method:
def showNormalizedImage(name, normalized_image):
mat = docscanner.convertNormalizedImage2Mat(normalized_image)
cv2.imshow(name, mat)
return mat
if ch == ord('n'): # normalize image
if g_results != None:
if len(g_results) > 0:
for result in g_results:
x1 = result.x1
y1 = result.y1
x2 = result.x2
y2 = result.y2
x3 = result.x3
y3 = result.y3
x4 = result.x4
y4 = result.y4
normalized_image = scanner.normalizeBuffer(image, x1, y1, x2, y2, x3, y3, x4, y4)
g_normalized_images.append((str(index), normalized_image))
showNormalizedImage(str(index), normalized_image)
index += 1
else:
print('No document found')
If you are satisfied with the result, you can save the normalized image to a file:
if ch == ord('s'): # save image
if len(g_normalized_images) > 0:
for data in g_normalized_images:
cv2.destroyWindow(data[0])
data[1].save(str(time.time()) + '.png')
print('Image saved')
data[1].recycle()
g_normalized_images = []
index = 0
Finally, let's run the Python document scanner app in the terminal.

Source Code
Posted on September 7, 2022
Join Our Newsletter. No Spam, Only the good stuff.
Sign up to receive the latest update from our blog.
Related